The mechanical components of the robot assembly can be broken down by the different platforms housing those components. The construction of the robot was organized into levels, both to facilitate easy assembly/disassembly and to design for fabrication by laser cutter.
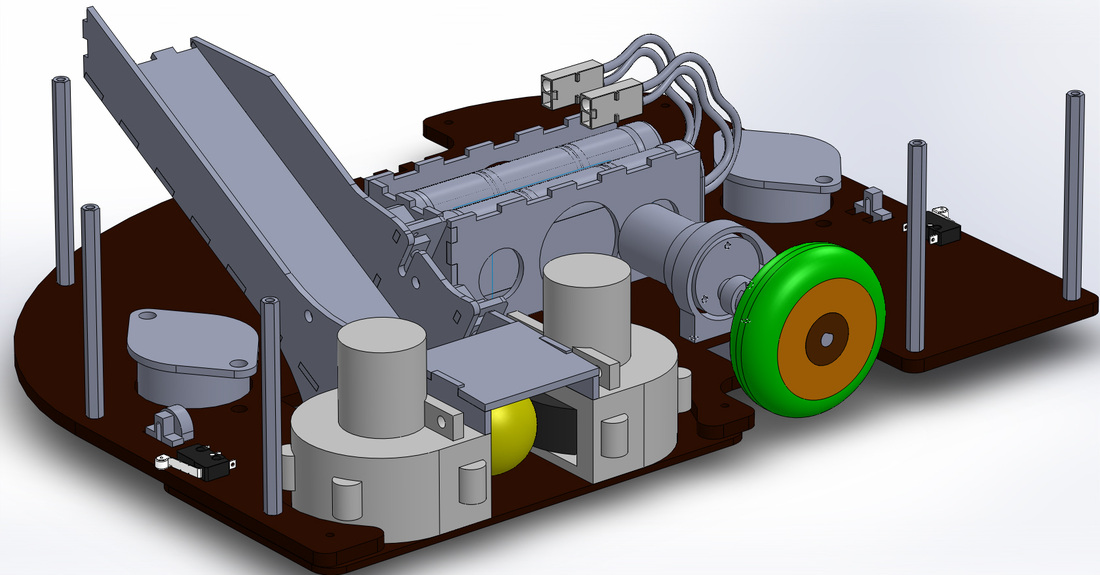
Lowest Level: Shooters and Drive Assembly
The lowest level strongly influenced the overall size of Shadowfax. We decided early on to shoot under the middle wall, requiring our shooter to be on the bottom level with the wheels, and to shoot faster than other teams, which required two motors. This made our base level a little larger than others, however we had already decided to make a heavier robot to more successfully deal with lance-to-lance contacts so this worked perfectly. This level also contained all of our power and ground terminals, to keep them close to the batteries, and the limit switches to detect the front and rear walls.
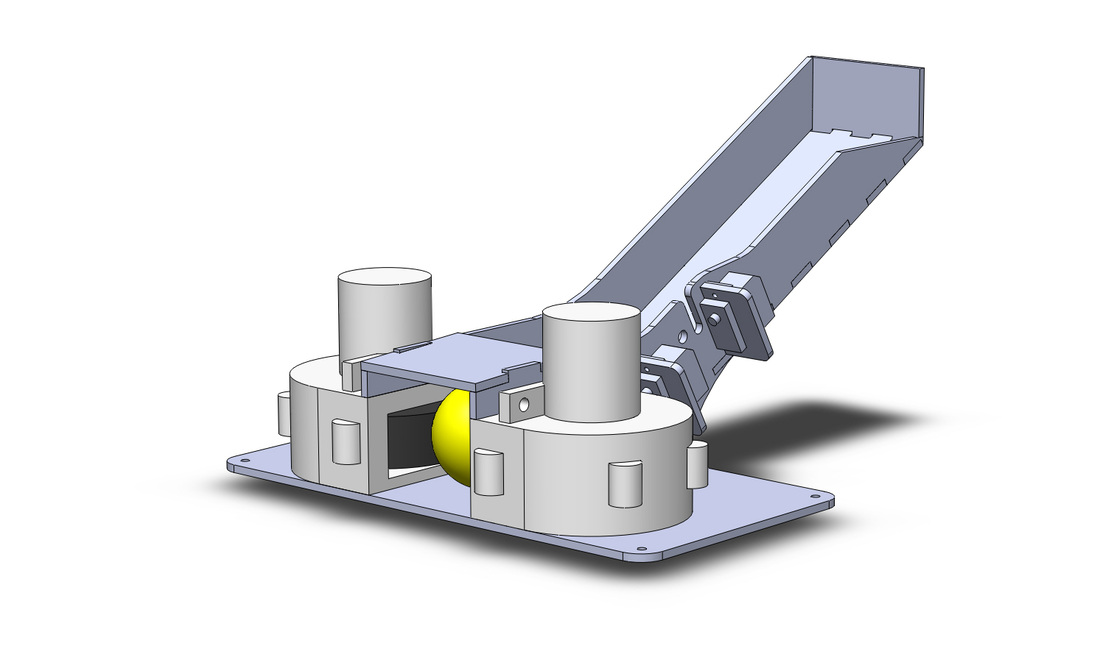
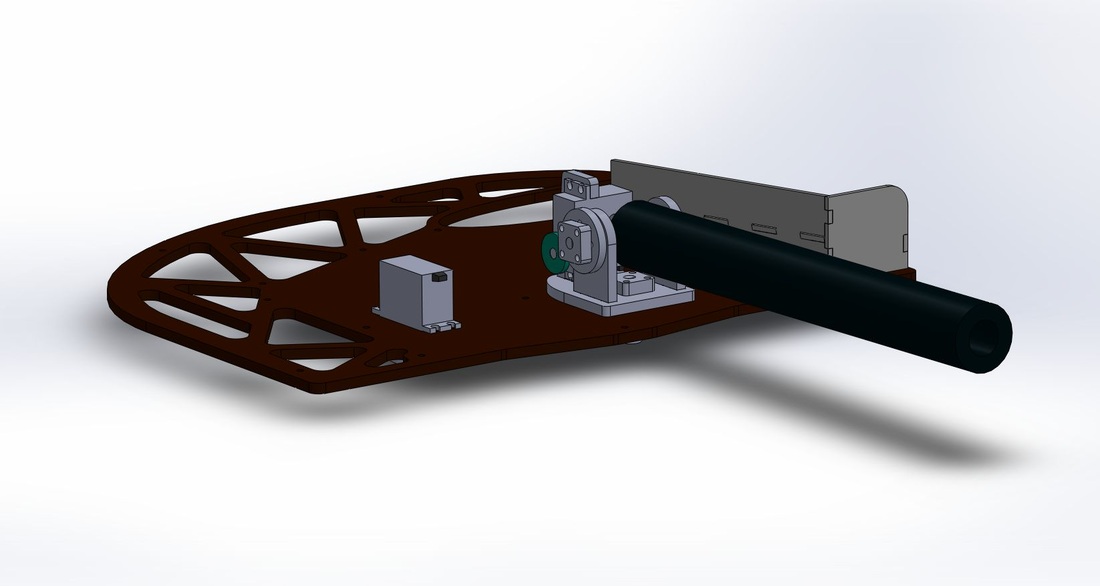
Ball Shooter Assembly
Full Lower Level Assembly: Batteries were inserted one on top of the other for easy removal, not side-by-side as shown here
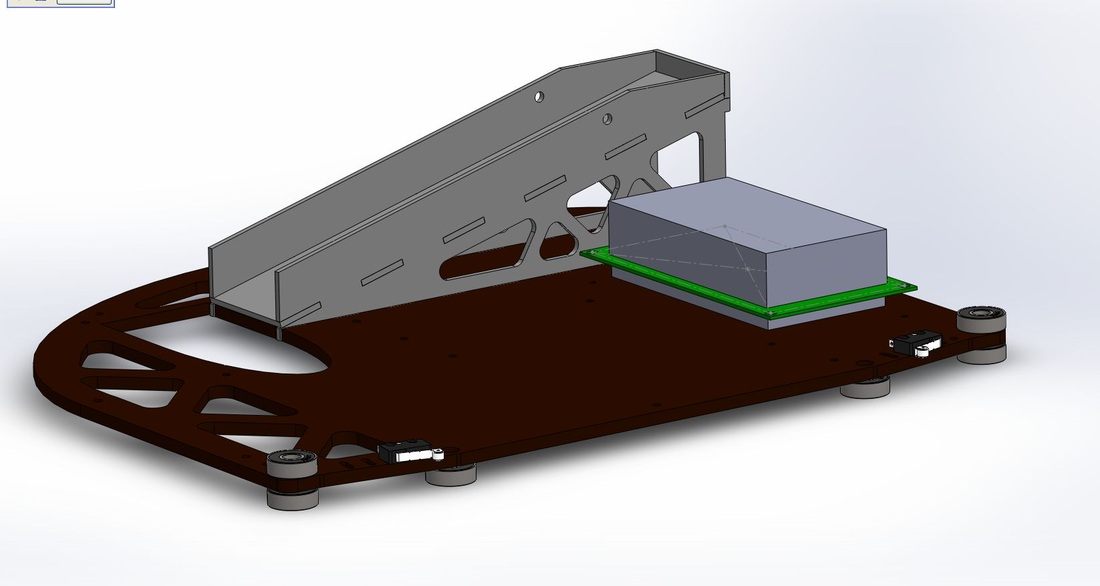
Level 2: Limit Switches for Alignment, E128 Mount, and Ball Ramp Mid Level
The second level contains all of the interactions with the middle wall. Roller bearings are included in case it rides against the wall and limit switches are used to maintain alignment with it. The E128 and all of the connections are included on this level, as well as battery power indicator lights and the middle portion of the ball collection ramp.
Level 3: Lance and Ball Intake Ramp
This level contains all of the components to control both pan and tilt of the lance, as well as the highest part of the ball collector and the IR blaster to communicate with the reload station.
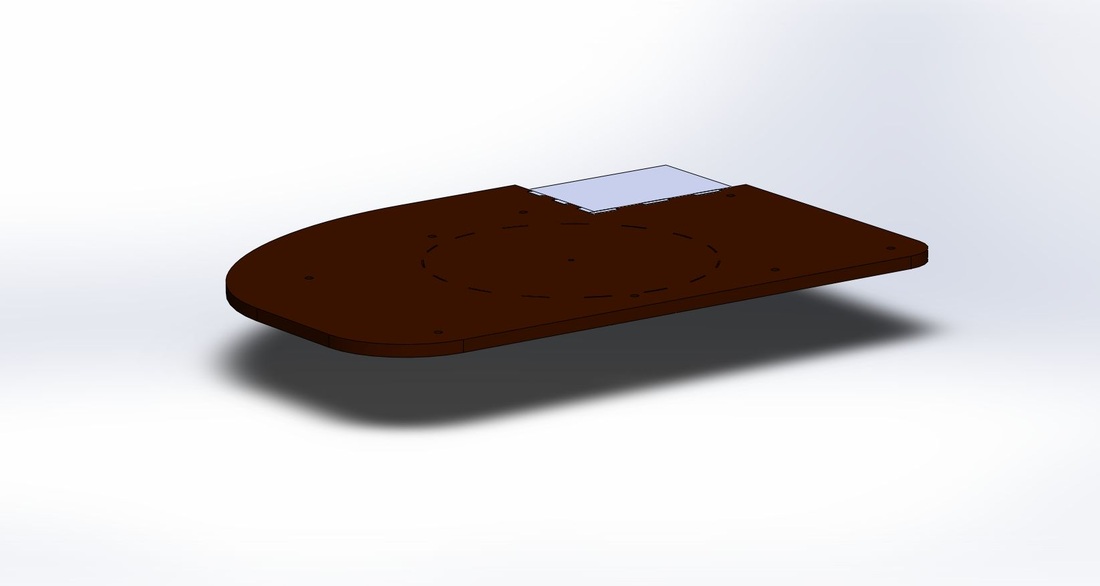
Top Level: Knight's Head and JSR
The simplest level, flat to carry the head with a small recessed area to align the top of the JSR (communications device) with the rest of the platform.